Quick problem-solving within 12 hours


24/7 online technical support
PDF|5.17MB
PDF|2.20MB
pdf|1.78M
pdf|392kb
pdf|236kb
pdf|624kb
pdf|844kb
pdf|260kb
pdf|312kb
pdf|184kb
pdf|324kb
pdf|344kb
ZIP|51.4MB
ZIP|48.5MB
ZIP|49MB
STP|5.23MB
STEP|11.1MB
STEP|9.61MB
STEP|10.0MB
STEP|10.0MB
STEP|9.61MB
STEP|10.0MB
STEP|10.0MB
STEP|5.58MB
STEP|6.00MB
PDF|36.5KB
PDF|22.6KB
PDF|28.4KB
PDF|22.5KB
PDF|27.5KB
PDF|21.3KB
PDF|73.9KB
PDF|76.9KB
PDF|1.01MB
PDF|805KB
zip|12.34MB
zip|8.00kb
zip|2.77MB
RealMan is a national high-tech enterprise that focuses on the research and development, production, and sales of the ultra-lightweight humanoid robotic arm. It can provide integrated equipment for ultra-lightweight humanoid robotic arms and related scenario application needs.
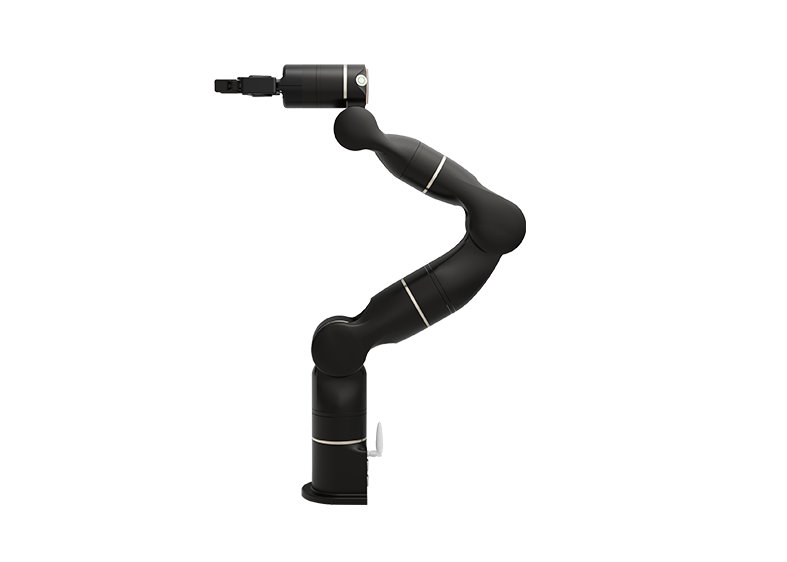
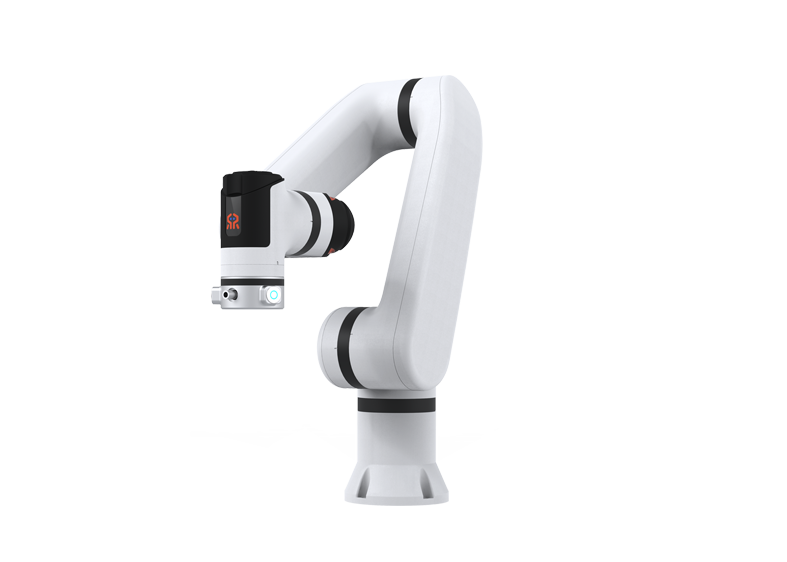
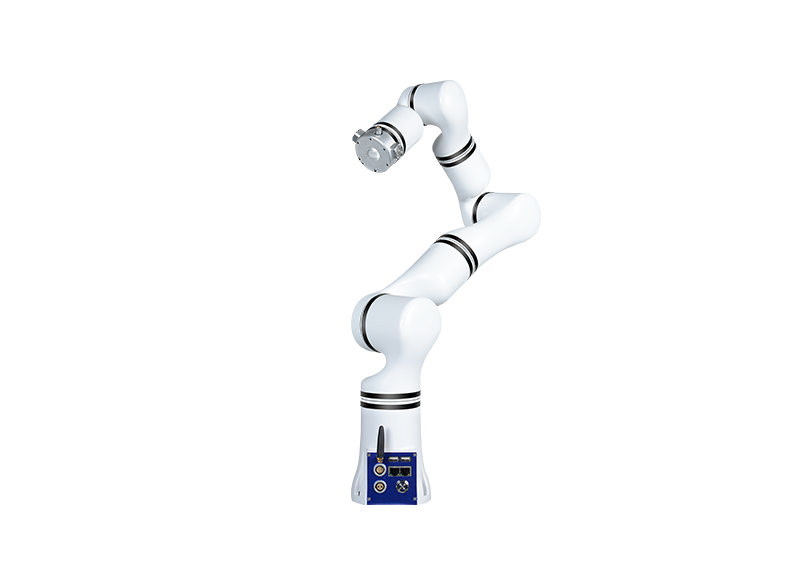
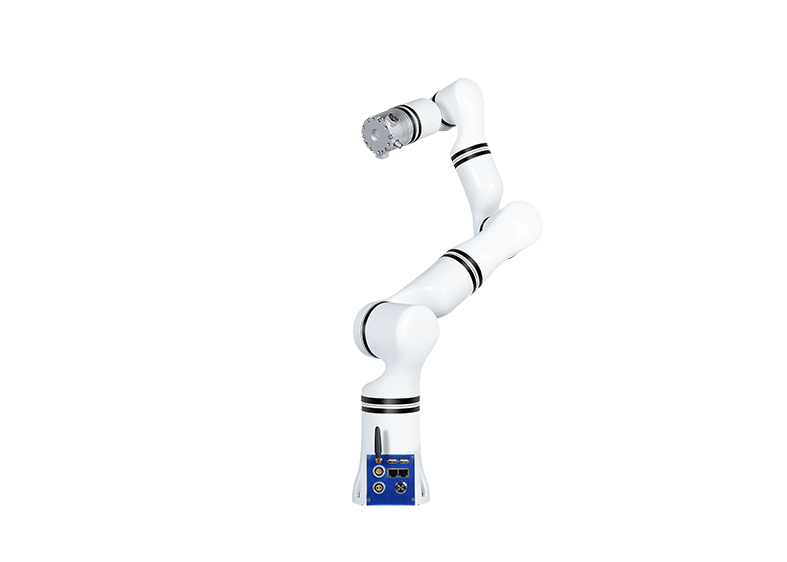
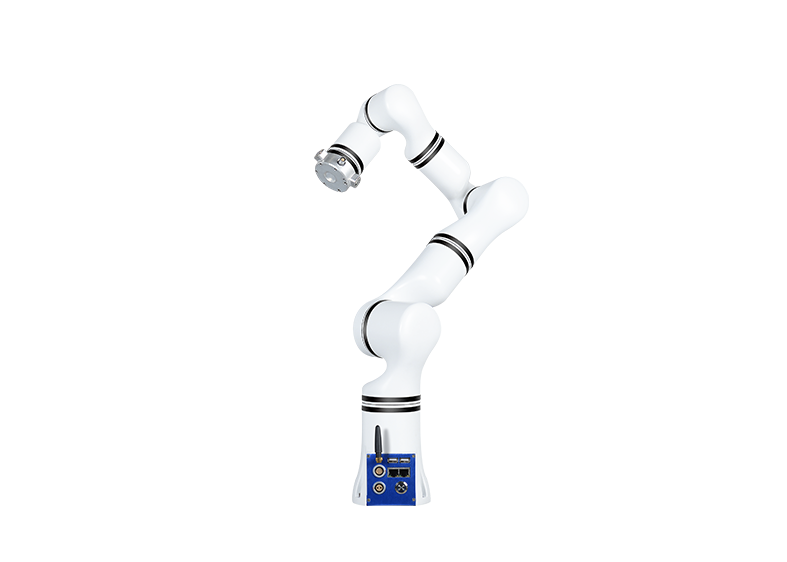
RealMan is the definer of the ultra-lightweight humanoid robotic arm, which means that the RM series robotic arm is only 1/4 of the weight of the ordinary cooperative manipulator, and the load can reach 5 Kg. It is completely modeled after the actual size and weight of the human arm on a scale of one to one, and each joint matches up to the human arm. It allows for no secondary modification of the original environment, truly fulfilling the robotic arm's friendly integration with humans and the environment.
The robotic arm and controller are integrated without traditional control cabinets. The weight of the basic version of the robotic arm body (with the controller) is only 7.2 KG, and it is only 6 KG without the controller. At the same time, the load can reach 5 KG, with a load-to-selfweight ratio of 1:1.2. It has an ultra-low power consumption, a DC 24V power supply, and is suitable for mobile power supplies. Under full-load conditions, the maximum power consumption is ≤ 200 W, and the comprehensive power consumption is ≤ 100 W.
There are three primary product series of ultra-lightweight humanoid robotic arms: the RM65, RM75, and RML63. RM stands for RealMan, L stands for long arm span, the first number stands for the number of axles, that is, 6 or 7-axis robotic arms, and the second number stands for weight in kilos. Each series is further divided into three models: -B denotes the basic version, -ZF denotes the one-axis-force version, and -6F denotes the six-axis-force version.
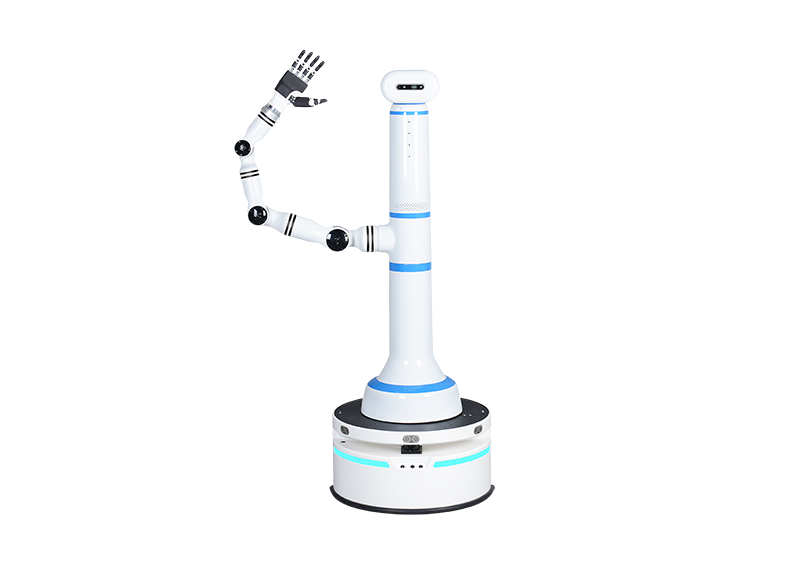
The RealMan robotic arm is now widely used in a variety of industries, including medical health, healthcare, intelligent inspection, automated laboratories, scientific research and education, new catering, new retail, home services, 3C transfer, logistics warehousing, industrial production, and agricultural harvesting, and there are corresponding successful cases.
There are currently three forms of secondary development supported, one is through API, which currently supports four development environments: C\C++\C#\Python. The second is to control through the JSON protocol, which is unrestricted for the development language and system. The third is to control through ROS, which currently supports two versions: melodic and noetic.
The software is licensed for life, and software upgrades are currently free.
The power supply voltage range of the robotic arm is 20 V to 27 V DC, and the power is 200 W. However, for the robotic arm to initialize and self-tune after being powered on, it is best for the power supply equipment to deliver a maximum instantaneous current of 20 A or higher.
The continuous service life of the robotic arm under rated load is 30000 hours. Currently, it has obtained MTBF testing certification from the Shanghai National Robot Testing Center.
The programs inside the robotic arm controller are the core of the company and are currently not open to the public.
There is no torque sensor inside the robotic arm's joint. The ultra-lightweight humanoid robotic arm operates joint force control using a current loop, which is equivalent to force control for our robotic arm.
Users with development capabilities can consider selective openness, but relevant agreements will be signed in advance. Users can create force controls using the force sensor data interface without having to develop a separate interface.
Transparent transmission refers to the user using the upper computer to plan the trajectory and then sending the angles of each joint straight to the controller. Each joint operates directly without being processed by the controller. The effectiveness of robotic arm operation directly depends on the level of user trajectory planning.
The maximum transmission period is 20 ms for WIFI, 20 ms for common network interfaces (right), and 10 ms for USB interfaces, 485-interface, and high-speed network interfaces (left).
It is mainly used to validate user algorithms or combine vision for dynamic trajectory planning in unstructured environments to achieve grasping or obstacle avoidance.
If users use our packaged API directly, it can only be called in Linux/Windows using C/C++/C#/Python projects, or using ROS operating systems.
If users use the JSON protocol, the flexibility will be much higher. As long as fixed strings can be delivered in accordance with the protocol, the user's operating system and programming language are not restricted.
Yes. The RS485 interface of the robotic arm can be used to control peripheral devices based on the Modbus protocol, such as sensors or grippers. The RS485 interface can also be used to control the robotic arm. It is necessary to switch modes through commands, but two modes cannot be used at the same time.
The end of the robotic arm can output 5V/12V/24V, with a maximum output current of 1.5 A. It can be a device with an RS485 communication interface that supports the standard Modbus RTU protocol.
At the same time, we have written the drivers for the two-finger gripper and five-finger dexterous hand on the end control board, which can be used directly.
The gripper can be operated while dragging and reproducing. This function is now only applicable to two-finger grippers, while the support range will be expanded in the future.
The trajectory after drag teaching can be saved and called through the teaching pendant and function interface.
The ZF and 6F versions of the robotic arm have internal force control algorithm modules that can be directly configured and used in the teaching pendant. At the same time, users can read sensor data directly and develop their own algorithms on the upper computer.
The collision level can be set by the robotic arm teaching pendant, which is separated into 0 to 8 levels. When powered on, the robotic arm does not enable collision detection by default.
The higher the collision level, the more sensitive the detection is, and the easier it is to stop accidental collisions. Users can configure it to meet their specific requirements.

Automatic download after filling in your information