

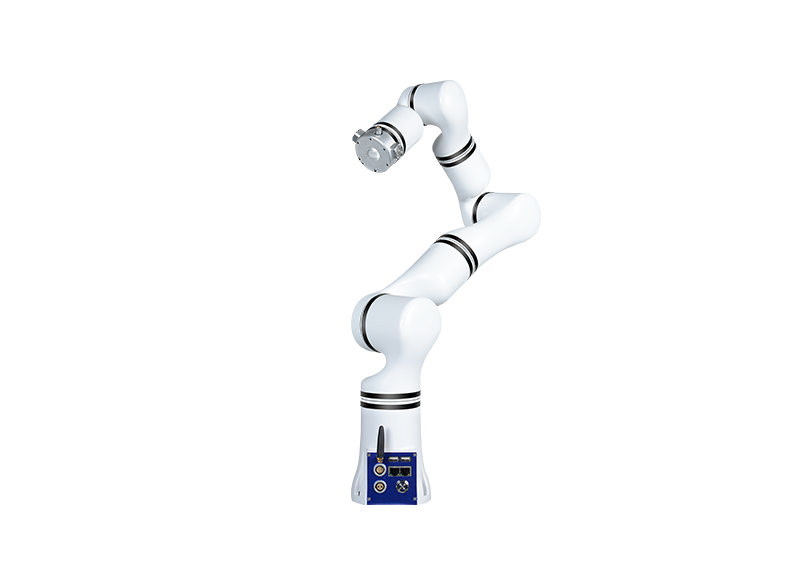
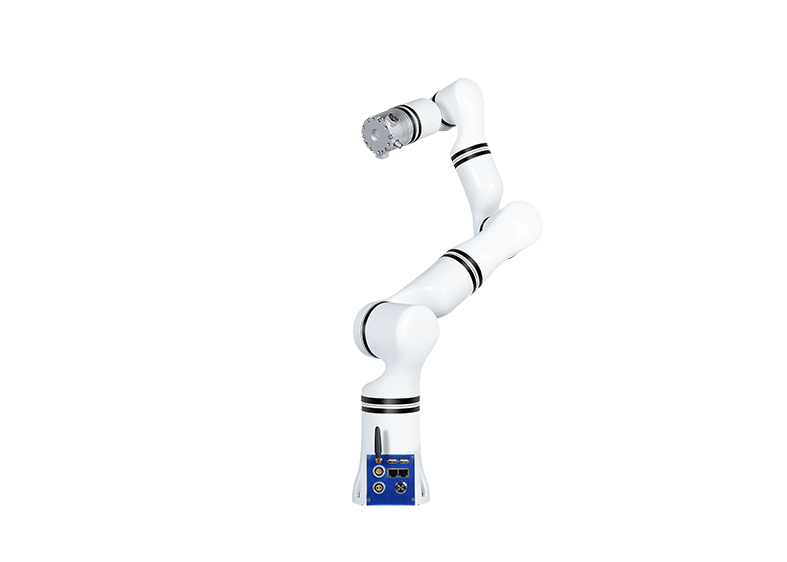
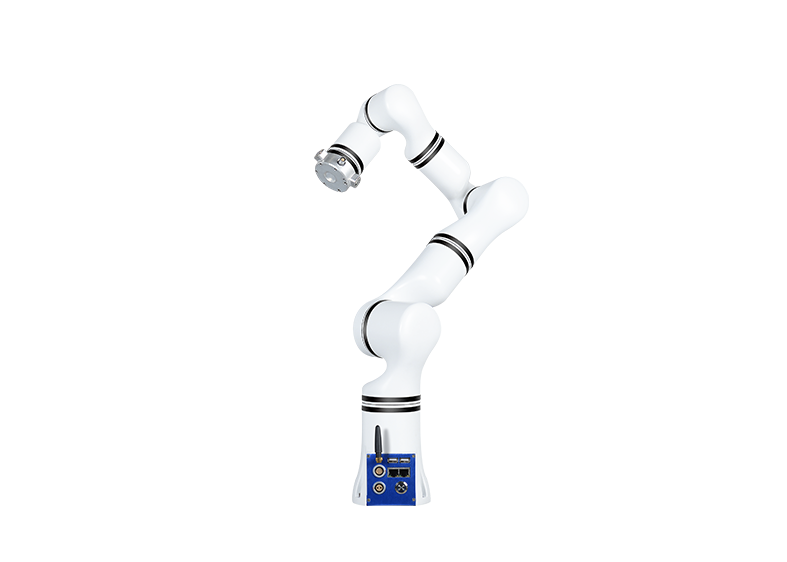









Generate trajectories based on infrared thermal imaging, cooperate with flexible force control of the robotic arm, reproduce master-level human massage techniques, and be widely used in massage, physical therapy, moxibustion, etc.
Advantages

Configuration
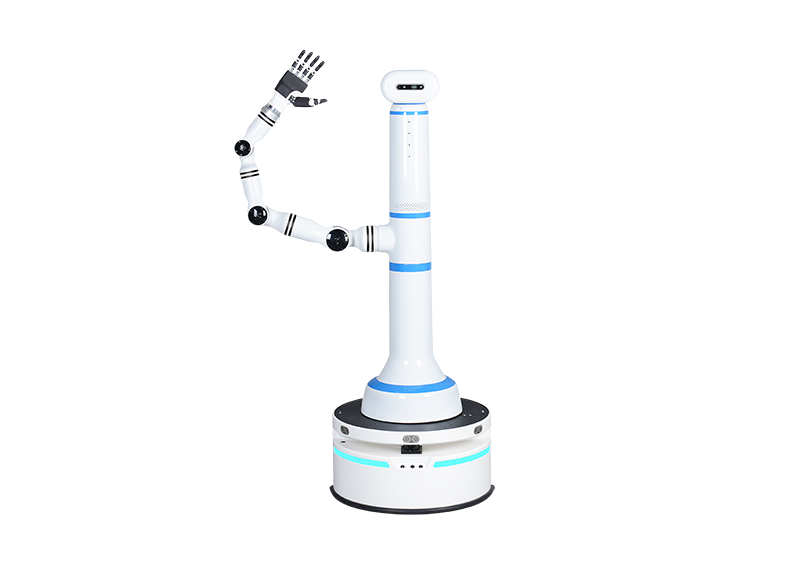
Provide voice broadcasting that includes voice prompts for operation steps, visual positioning and infrared imaging, scanning of human body features, and auxiliary diagnosis of illness, as well as data collection and transmission.

Interactivity
Provide a human-computer interaction interface that allows for manual input of massage parts, massage gear selection, and other information; provide a real-time display of device status, making it easy for users to operate robots.


Hygiene
Massage ends can be cleaned and changed rapidly to ensure the cleanliness and hygiene of the massage process, making users feel more at ease.


Physical Therapy
Provide functions such as relaxing the fascia layer, relieving pain, promoting blood circulation, assisting in functional recovery, and providing beauty and skincare.

Application Scenarios


Downloads
Product Manual
-
RealManProduct brochuresV2.1_EN
PDF|5.17MB
Joint Information
-
Tiny Mighty joint module Brochure V1.0_EN
PDF|2.20MB
User Manual
-
RMC-HC-01 Healthcare Robot User Manual V1.0
pdf|1.78M
-
RealMan Robotrm_exampleUser Manual V1.0
pdf|392kb
-
RealMan Robotrm_controlUser Manual V1.0
pdf|236kb
-
RealMan Robotic Arm ROS2 User Manual V1.0
pdf|624kb
-
RealMan Robotic Arm rm_moveit2_config User Manual V1.0
pdf|844kb
-
RealMan Robotic Arm rm_gazebo User Manual V1.0
pdf|260kb
-
RealMan Robotic Arm rm_driver Topic Detailed Description (ROS2) V1.0
pdf|312kb
-
RealMan Robot rm_ros_interface User Manual V1.0
pdf|184kb
-
RealMan Robot rm_driver User Manual V1.0
pdf|324kb
-
RealMan Robot rm_description User Manual V1.0
pdf|344kb
Control Software
-
RML63 V6.1.4
ZIP|51.4MB
-
RM75 V6.1.4
ZIP|48.5MB
-
RM65 V6.1.4
ZIP|49MB
3D Model
-
ECO65-B
STP|5.23MB
-
ECO65-6F
STEP|11.1MB
-
RM65-B
STEP|9.61MB
-
RM65-ZF
STEP|10.0MB
-
RM65-6F
STEP|10.0MB
-
RM75-B
STEP|9.61MB
-
RM75-ZF
STEP|10.0MB
-
RM75-6F
STEP|10.0MB
-
RML63-B
STEP|5.58MB
-
RML63-ZF
STEP|6.00MB
Dimensional Drawing
-
ECO65 dimension
PDF|36.5KB
-
ECO65 installation drawing
PDF|22.6KB
-
End Effector Installation Dimensional Drawing
PDF|28.4KB
-
Installation Dimensional Drawing of RML63 Series Robot Arm Base
PDF|22.5KB
-
RML63 dimension
PDF|27.5KB
-
Installation Dimensional Drawing of RM65, RM75 Series Robot Arm Base
PDF|21.3KB
-
RM65 dimension
PDF|73.9KB
-
RM75 dimension
PDF|76.9KB
Development Protocol
-
RealMan 6-Dof Robot JSON Protocol-V3.1
PDF|1.01MB
SDK
-
RealMan Robot Interface Function Description V3.1
PDF|805KB
ROS
-
ROS1
zip|12.34MB
-
RM65系列URDF文件
zip|8.00kb
-
ROS2
zip|2.77MB