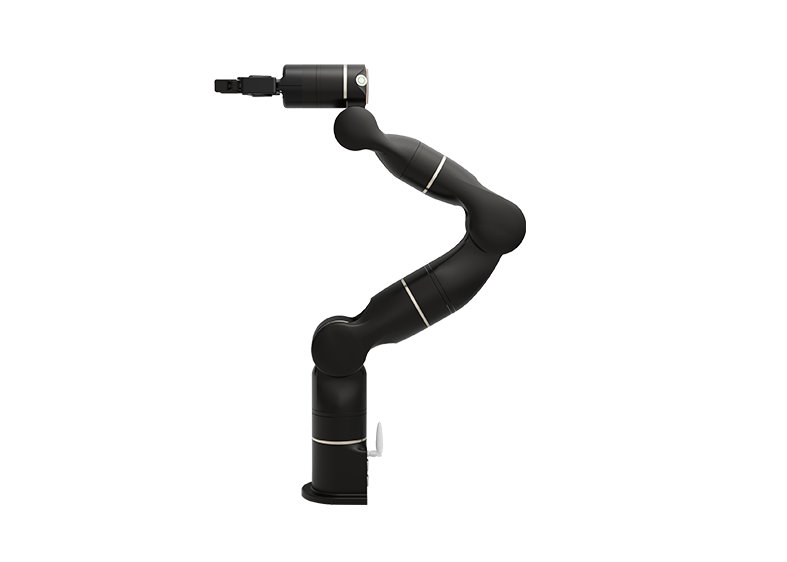

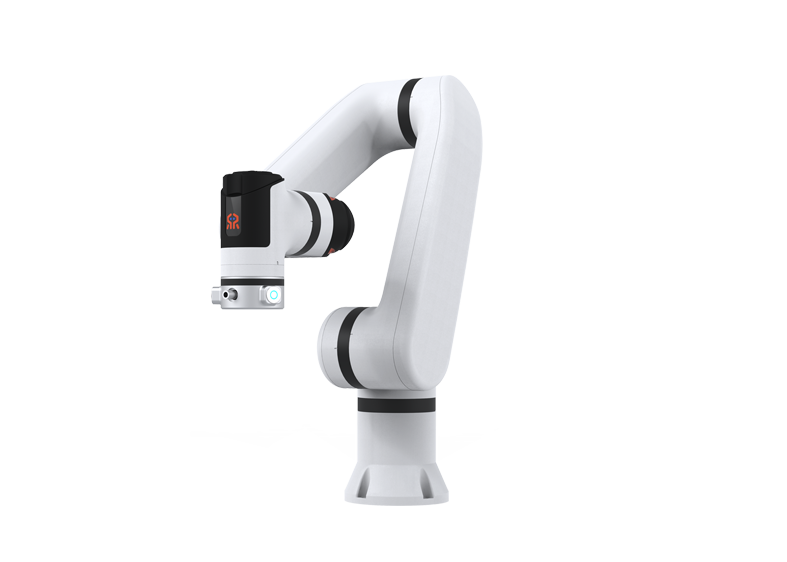

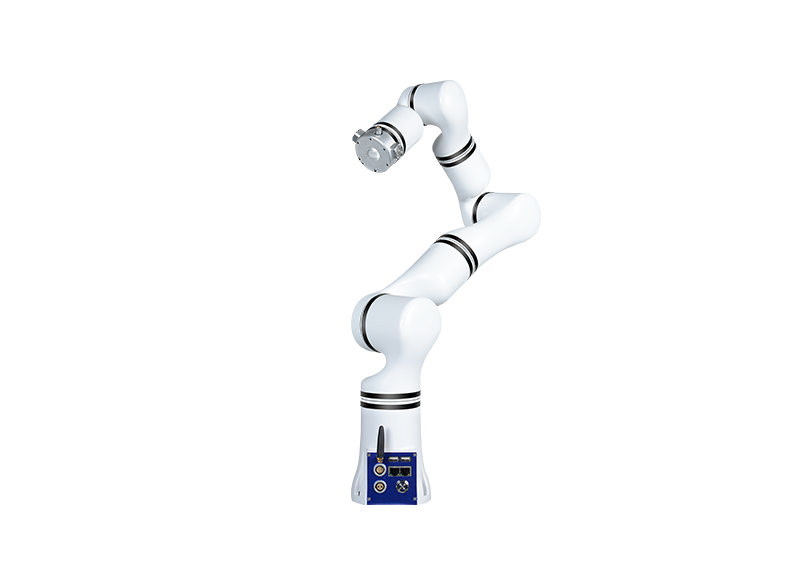
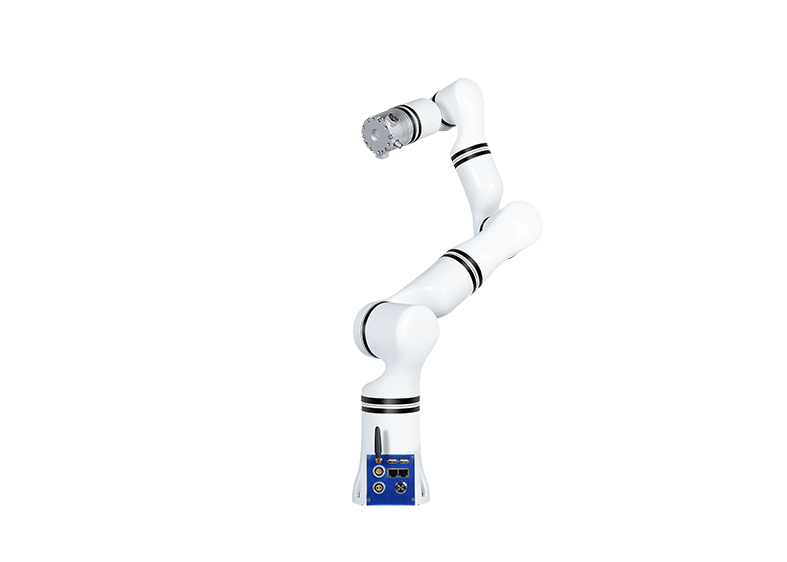
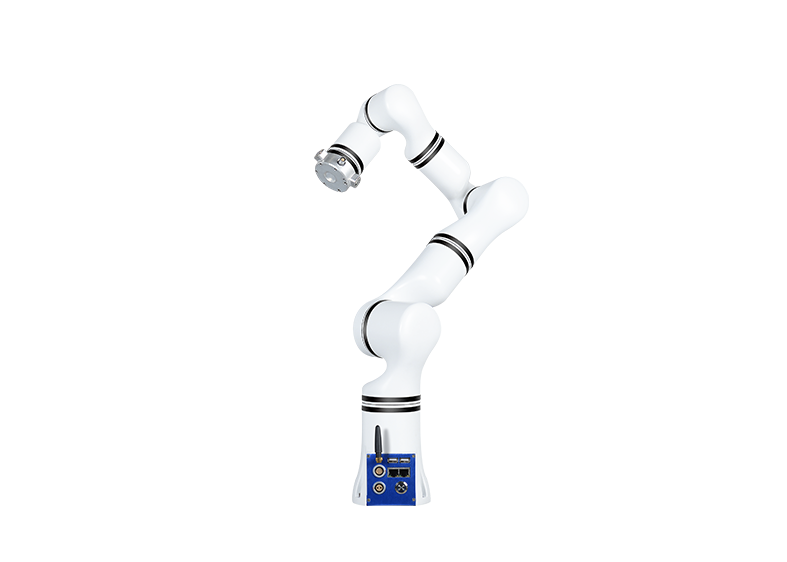









The ECO65-B is a six-degree-of-freedom economical standard robotic arm developed by RealMan. The integrated structure of the controller and the robotic arm has a total weight of 7.8KG, with an effective payload of up to 5KG. It has a repeat positioning accuracy of ±0.05mm and a working radius of 610mm.
-
7.8kg
Weight
-
5kg
Payload
-
610mm
Working radius
-
±0.05mm
Repeatability
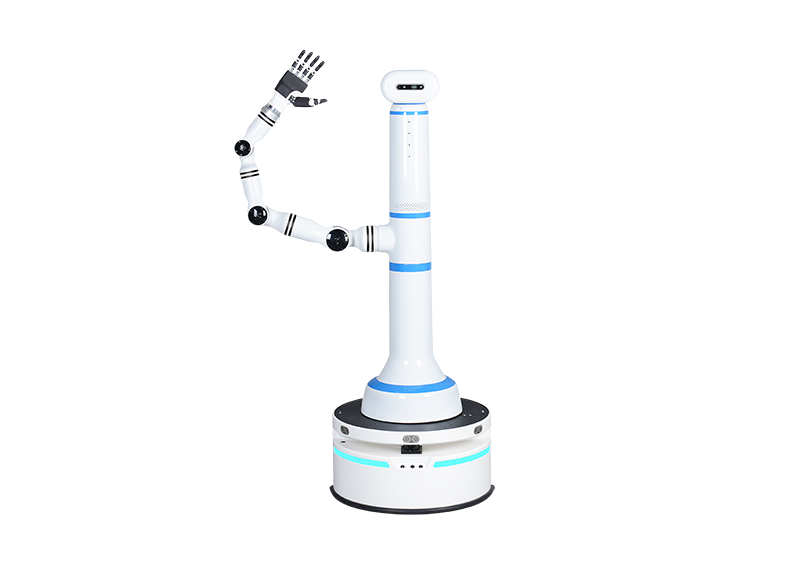
Cases
Application Scenarios








Specs
| ECO65-B | |
|---|---|
| Degree of freedom | 6 |
| Payload | 5kg |
| Body weight | 7.8kg |
| Repeatability | ±0.05mm |
| Working radius | 610mm |
| Power supply voltage | DC20~30V,DC24V |
| Power Consumption | Max Power Consumption 200W Comprehensive power consumption 100W |
| IP Grade | IP54 (robotic arm body) |
| Materials | Aluminum alloy +ABS |
| Controller | Integrated |
| Communication mode | WIFI/network interface/Bluetooth/USB serial port/RS485 |
| Control mode | Drag and drop teaching/Teaching pendant/API/JSON |
| Joint motion range | J1 ±178°、J2 ±135°~178°、J3 ±145°~160°、J4 ±178°、J5 ±178°、J6 ±360° |
| Maximum speed | J1-J2 180°/s、J3-J6 225°/s |
Downloads
Product Manual
-
RealManProduct brochuresV2.1_EN
PDF|5.17MB
Joint Information
-
Tiny Mighty joint module Brochure V1.0_EN
PDF|2.20MB
User Manual
-
RMC-HC-01 Healthcare Robot User Manual V1.0
pdf|1.78M
-
RealMan Robotrm_exampleUser Manual V1.0
pdf|392kb
-
RealMan Robotrm_controlUser Manual V1.0
pdf|236kb
-
RealMan Robotic Arm ROS2 User Manual V1.0
pdf|624kb
-
RealMan Robotic Arm rm_moveit2_config User Manual V1.0
pdf|844kb
-
RealMan Robotic Arm rm_gazebo User Manual V1.0
pdf|260kb
-
RealMan Robotic Arm rm_driver Topic Detailed Description (ROS2) V1.0
pdf|312kb
-
RealMan Robot rm_ros_interface User Manual V1.0
pdf|184kb
-
RealMan Robot rm_driver User Manual V1.0
pdf|324kb
-
RealMan Robot rm_description User Manual V1.0
pdf|344kb
Control Software
-
RML63 V6.1.4
ZIP|51.4MB
-
RM75 V6.1.4
ZIP|48.5MB
-
RM65 V6.1.4
ZIP|49MB
3D Model
-
ECO65-B
STP|5.23MB
-
ECO65-6F
STEP|11.1MB
-
RM65-B
STEP|9.61MB
-
RM65-ZF
STEP|10.0MB
-
RM65-6F
STEP|10.0MB
-
RM75-B
STEP|9.61MB
-
RM75-ZF
STEP|10.0MB
-
RM75-6F
STEP|10.0MB
-
RML63-B
STEP|5.58MB
-
RML63-ZF
STEP|6.00MB
Dimensional Drawing
-
ECO65 dimension
PDF|36.5KB
-
ECO65 installation drawing
PDF|22.6KB
-
End Effector Installation Dimensional Drawing
PDF|28.4KB
-
Installation Dimensional Drawing of RML63 Series Robot Arm Base
PDF|22.5KB
-
RML63 dimension
PDF|27.5KB
-
Installation Dimensional Drawing of RM65, RM75 Series Robot Arm Base
PDF|21.3KB
-
RM65 dimension
PDF|73.9KB
-
RM75 dimension
PDF|76.9KB
Development Protocol
-
RealMan 6-Dof Robot JSON Protocol-V3.1
PDF|1.01MB
SDK
-
RealMan Robot Interface Function Description V3.1
PDF|805KB
ROS
-
ROS1
zip|12.34MB
-
RM65系列URDF文件
zip|8.00kb
-
ROS2
zip|2.77MB