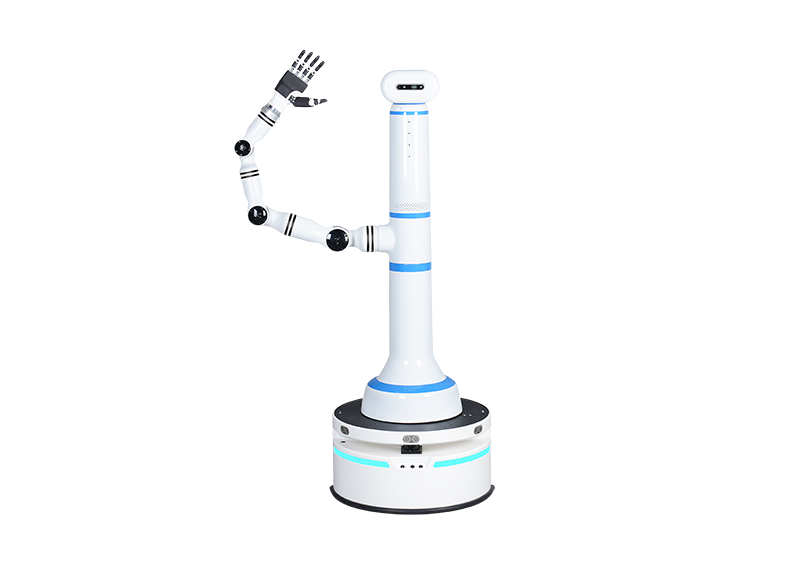
This five-finger dexterous hand, also known as the piano hand, moves quickly and has a slightly smaller grip. It has an integrated force sensor, 6 degrees of freedom, 12 motion joints, and supports ROS. It can simulate complex movements like playing the piano and guessing boxing by combining it with a force-position hybrid control algorithm.



RM56S2B-2R |
|
|---|---|
Control interface |
RS485 |
Degree of freedom |
6 |
Number of joints |
12 |
Weight |
530g |
Working voltage |
24V DC±10% |
Peak current |
2A |
Repeatability |
±0.2mm |
Maximum thumb grip |
15N |
Four-finger thumb grip |
10N |
Grip resolution |
0.5N |
Thumb lateral rotation range |
>65° |
Thumb lateral swing speed |
107°/s |
Thumb bending speed |
70°/s |
Four-finger bending speed |
260°/s |

Automatic download after filling in your information