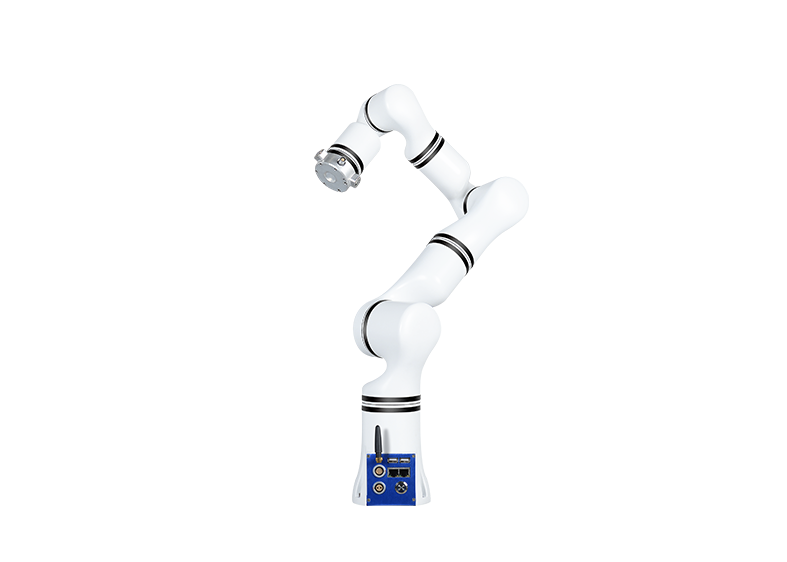
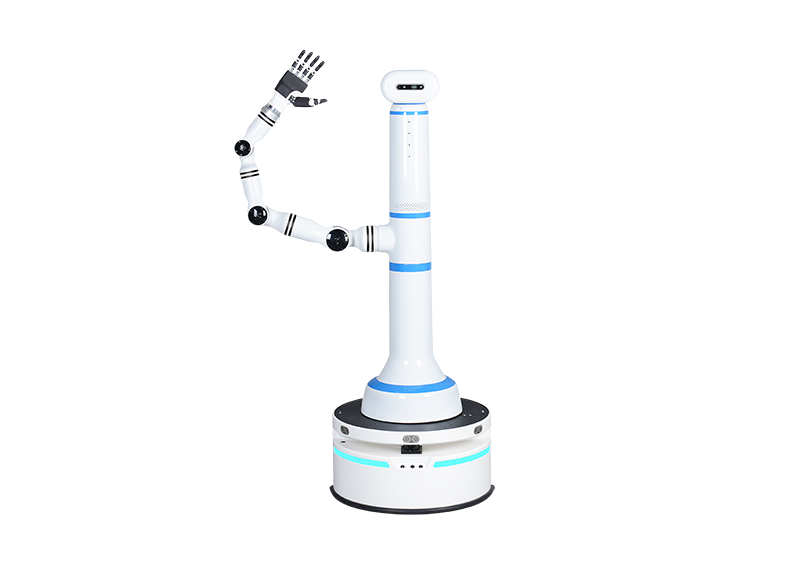
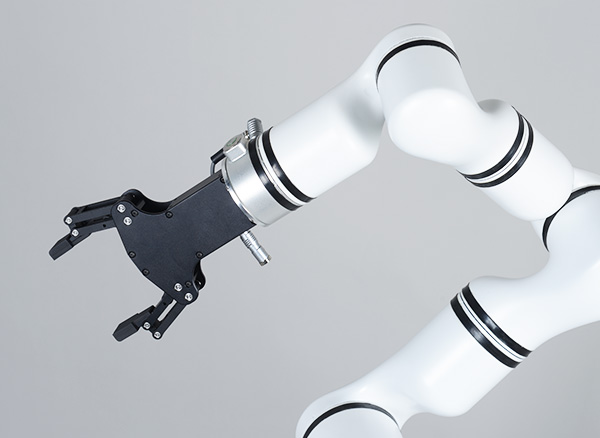
This gripper adopts an innovative linear drive linkage design, with force-position control, large opening, light weight, power-off self-locking and support for ROS. As the end effector of a cooperative robotic arm, it is mainly used in fields such as loading and unloading, sorting, unmanned retail, teaching and research.


EG2-SF16 |
|
|---|---|
Clamping force |
0-20N |
Clamping force adjustment accuracy |
±1N |
Repeatability |
±0.5mm |
Total travel |
0-70mm |
Full closing time |
1.3s |
Weight |
231g |
Communication interface |
RS485 |
Working voltage |
24V DC±10% |
Peak current |
0.7A |
Protection level |
IP40 |

Automatic download after filling in your information