










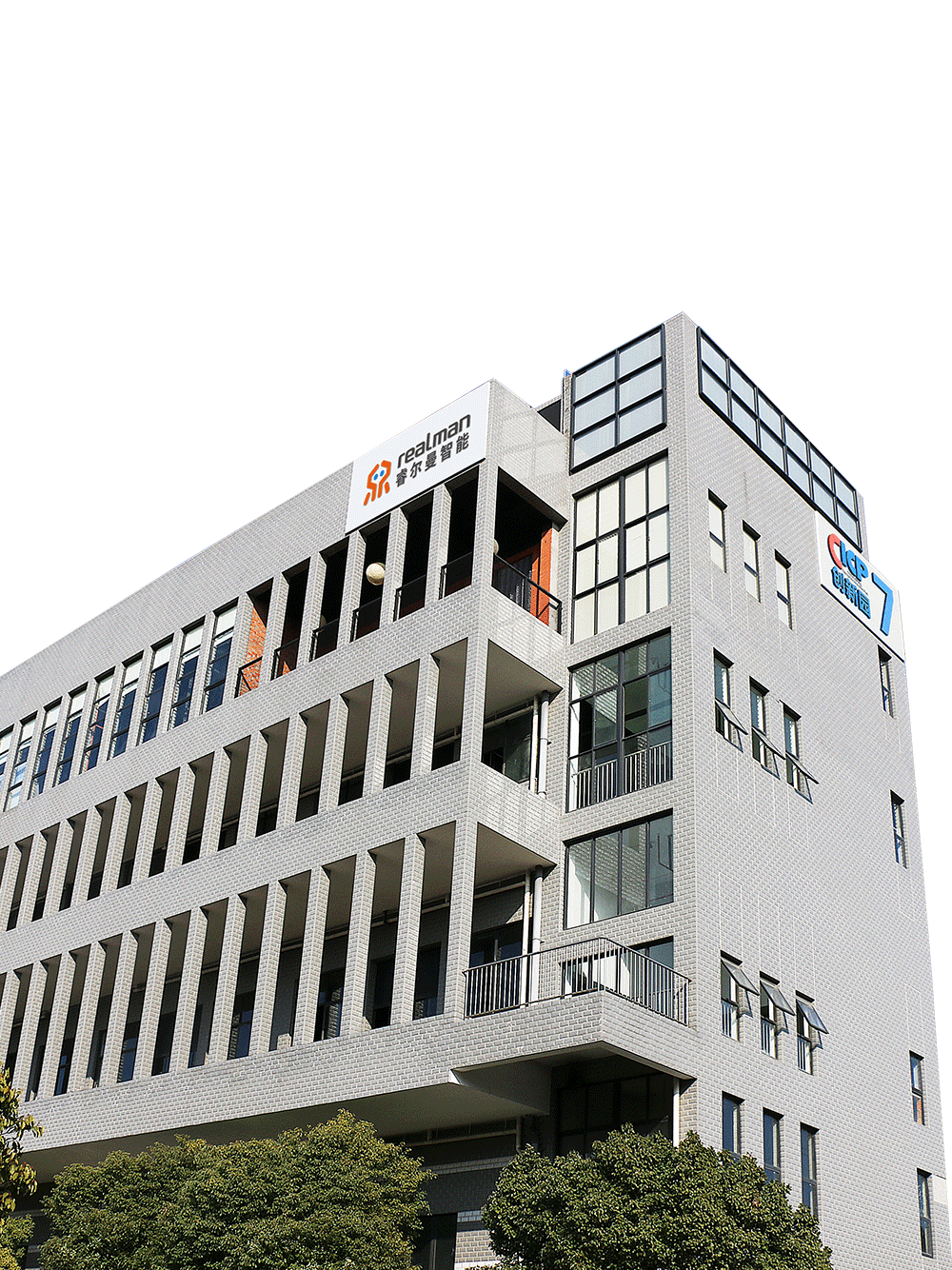
Company Profile
History
Since 2010, RealMan has been innovating and developing ultra-lightweight humanoid robotic arms for more than 10 years, with profound technical heritage and research and development experience.We have truly achieved prototype design of robotic arms as well as independent research and development of underlying components at the genetic level.

Qualifications

Gaogong Golden Ball Award

Certificate of High & New Technological Enterprise

Quality Management System Certification Certificate

CE Certification Certificate

EMC Certification Certificate

FCC Certification Certificate Beijing Company
FCC Certification Certificate Jiangsu Company
MTBF Mean Time Between Failures 30000 Hours
Composite Lifting Robot Control Platform V1.0
ZL 2022 21407266.4
ZL202121846372.8
ZL-2021-2-0962150.6
ZL202121848204.2.
ZL-2021-2-1377916.0
ZL-2021-2-0960640.2
ZL202130460296.6
ROS Control Software V1.0 based on RM Robot
RM Robot Dynamics Calibration Software V1.0
RM Robot Teaching Software V1.0
Underlying Control Software for Humanoid Robots
Composite Upgrade Robot Control Platform V1.0
Control Software for Humanoid Robots

ZL-2018-2-0872838
ZL-2021-2-0962150.6

ZL-2018-2-1125798.2

ZL-2019-2-0470772.X

ZL-2018-2-1118657.8

ZL-2018-2-1117539.5

ZL-2018-2-1120730.5
ZL-2021-2-1377916.0

ZL-2018-2-1117536.1
ZL-2021-2-0960640.2

ZL-2018-2-0293053.0

ZL-2018-2-0558832.9

ZL-2018-1-0577552.7

ZL-2018-1-0778977.4

ZL-2018-1-0171900.0
Member Unit of Shenzhen Robotics Association
CMR Member Unit
Investment Value Enterprises for 2021

Excellent Partner of the World Robotics Congress

Beijing Specialized and Innovative Small and Medium-sized Enterprises
Duty Certificate

China Robot Technology Breakthrough Award
World Robot Conference for 2021
Culture
-


Corporate Slogan
Wonderful Life Needs Robotic Arms
-


Corporate Mission
Make Intelligent Robotic Arm Accessible to Everyone
-


Corporate Values
Sincere and Responsible, Passionate and Confident, Seeking Truth and Innovation, and Pursuing Excellence
-


Corporate Vision
Bringing robots into thousands of homes and giving a helping arm to a more intelligent life!
Careers
Pursue your dream and send your resume:ava@realman-robot.com
销售经理(教育行业)
- 学历:专科及以上学历
- 工作地点:全国
- 薪资:6-15K
岗位要求:
1、统招专科及以上学历,市场营销、自动化等相关专业优先;
2、2年以上销售行业工作经验,有机械臂销售经验者优先;
3、具备优秀的市场洞察能力,善于挖掘新的市场需求和产品需求;
4、具有优秀的表达能力和谈判技巧,擅于沟通交流,有良好团队合作精神;
5、富有激情,能承受工作压力。
岗位职责:
1、 了解、熟悉大学院校、高职院校、科研院所招投标业务流程及业务采购模式;
2、 了解、熟悉机器人相关产品,负责项目订单的跟进和落地;
3、 客户的定期拜访、沟通,进行客户关系的维护和进一步开发;
4、 与客户建立长期而稳定的合作关系;
5、 收集分析对应行业信息,及其他需要协调的工作;
6、 能够适应短期出差。
销售经理(机器人方向)
- 学历:大专及以上学历
- 工作地点:全国
- 薪资:6-15K
岗位要求:
1、大专及以上学历,市场营销、机械、电气、自动化机器人相关专业优先;
2、2年以上销售工作经验,有机器人销售经验者优先;
3、具有较强的沟通与谈判能力,出色的营销技巧、销售技能与说服能力;
4、在销售Leader的领导下,根据销售团队所制定的销售目标,开发新的销
岗位职责:
1、负责区域内的市场拓展及经营活动、制定客户拓展及经营计划、负责销售渠道管理;
2、跟踪、监控销售过程及执行情况,持续改善销售过程,降低销售风险、提升销售计划的可控性;
3、建立、维护和加深与重点客户及合作伙伴的关系,经营行业生态圈。
海外销售经理(机器人方向)
- 学历:本科及以上学历
- 工作地点:深圳/北京
- 薪资:15-25k
岗位要求:
1、本科及以上学历,2年以上外贸销售工作经验;有B2B类外贸销售、科 技类外贸销售工作经验者优先;
2、英语6级,具有良好的英文写作及听说能力;如口语和电子邮件流利可以适当放低要求(4级);
3、具有强烈的目标感,自驱力和抗压能力强,积极乐观;
4、乐于学习,具备较强的逻辑思维能力、总结分析能力;
5、擅长沟通、组织协调、团队协作。
岗位职责:
1、根据公司战略要求,制定销售目标与计划,对国际市场进行新客户开发与渠道管理,推动公司与国外各区域业内客户达成合作;
2、熟悉外贸操作流程,熟悉海外客户的开拓方法,能独立通过各种获客工具、平台、搜索引擎、国内外展会等线上线下不同途径开发客户;
3、根据客户需求完成项目可行性分析、产品选型、方案初步规划、编制报价、协商签订合同;
4、有效沟通,与技术及交付部门协调,保证订单顺利出运、交付。
软件测试工程师
- 学历:本科及以上学历
- 工作地点:北京
- 薪资:10-20k
岗位要求:
1、本科及以上学历,电子计算机及相关专业优先,2年以上工作经验;
2、掌握基本的测试理论知识,对潜在风险有敏锐的嗅觉;
3、认真负责,具有良好的沟通能力和团队合作精神;
4、了解C++,C,python等至少一种编程语言。
岗位职责:
1、根据产品需求,理解设计实现,设计测试方案并落地执行;
2、负责机器人软件的功能及性能测试,主导推进测试问题解决;
3、积极发现产品开发中的进度、流程、质量风险,提出合理化建议;
4、遇到问题和发现风险及时向上反馈。
算法工程师
- 学历:研究生及以上学历
- 工作地点:常州
- 薪资:20-40k
岗位要求:
1、研究生及以上学历,自动化、控制、数学、机器人等相关专业优先;
2、具有扎实的数学基础,精通常用机械臂运动学、动力学、轨迹规划等算法;
3、精通机器人学基础知识,有在线实时轨迹规划相关开发经验;
4、熟练掌握C/Matlab编程。
岗位职责:
1、负责机械臂轨迹规划算法开发和优化,尤其是在线实时轨迹规划;
2、负责机械臂相关算法的编码实现、测试及文档撰写。
售前工程师
- 学历:大专及以上学历
- 工作地点:深圳
- 薪资:15-25k
岗位要求:
1.、大专及以上学历,三年以上工作经验,理工类专业(机器人、电气自动化专业、机械电子优先);
2.、具备较好的机器人产品及解决方案技术能力,熟悉常见机器人功能及使用,熟悉视觉、夹持工具等周边设备技术及应用;
3、具备良好的沟通能力、学习能力、团队协作能力;
4、 具备良好的抗压能力;
5、熟练使用各种相关软件。
岗位职责:
1、 负责公司产品和解决方案的售前支持工作,协助销售人员分析客户需求,完成售前方案设计;
2、客户售前技术支持,帮助客户进行机器人选型,为客户提供专业的机器人使用及方案设计建议;
3、负责产品的技术培训及推广。
技术支持工程师
- 学历:大专及以上学历
- 工作地点:常州
- 薪资:8-18k
岗位要求:
1、大专及以上学历,机器人、自动化、机械、电气、软件等相关专业;
2、有良好的自学能力,踏实肯干,有上进心,有责任心;
3、熟悉协作机器人操作者优先;
4、能熟读电气图、电气原理图者优先;
5、有软件开发经验者优先;
6、能适应短期出差,有良好的心态,有较强抗压能力。
岗位职责:
1、根据客户需求,评估机器人实施的可行性,提供选型建议;
2、受理客户咨询的技术问题,追踪客户项目实施进展;
3、按照公司安排进行机械臂的展示、测试等工作;
4、配合销售部提供技术支持;
5、负责对客户开展机器人的培训工作。
软件开发工程师
- 学历:本科及以上学历
- 工作地点:常州
- 薪资:15-25k
岗位要求:
1、大学本科及以上学历,计算机/自动控制/机械电子等相关专业优先,1年以上机器人开发经验;
2、熟悉Linux/Unix开发环境,精通C/C++语言,熟悉gcc;
3、了解Qt开发环境,熟练掌握QT库及架构;
4、有机器人视觉引导项目开发经验和运动控制开发经验者优先;
5、有ROS开发经验者优先,有Ubuntu平台项目开发经验者优先;
6、有系统的数据通信知识,熟悉TCP/IP协议,精通Socket网络编程者优先。
岗位职责:
1、负责协作机械臂应用的开发与设计;
2、基于公司机械臂产品,对配套设备,如夹爪、视觉等做集成开发;
3、为客户提供机械臂系统软件解决方案。
视觉开发工程师
- 学历:本科及以上学历
- 工作地点:常州
- 薪资:20-30k
岗位要求:
1、本科及以上,计算机科学、自动化、电子工程等相关专业优先,专业方向为机器学习/人工智能在机器视觉或图像处理上的应用;
2、熟练掌握和使用基于Python或C/C++的TensorFlow、PyTorch等开源工具;
3、熟悉常见的深度学习算法。
岗位职责:
1、在实际机器视觉相关项目中担任主要负责人或者参与者;
2、在基于深度学习的物体识别、检测或者分割相关项目中担任主要负责人或者参与者;
3、有小模型开发,移动端和嵌入式开发板部署经验;
4、有6D物体检测经验者优先;
5、有强化学习相关项目开发者优先。
ROS开发工程师
- 学历:本科及以上学历
- 工作地点:北京
- 薪资:15-25k
岗位要求:
1、本科及以上学历,计算机、人工智能以及自动化相关专业优先;
2、精通Linux程序架构设计,2年以上ROS相关软件开发工作经验;
3、了解ROS下的Moveit、IKFast等内容;
4、有ROS2开发经验者优先考虑;
5、熟练掌握C/C++或者Python开发语言。
岗位职责:
1、负责机械臂在ROS中的应用开发与优化;
2、参与产品软件的需求分析、框架设计、实施与测试;
3、实现公司其他产品,如复合机器人在ROS中的开发。
软件开发工程师
- 学历:本科及以上学历
- 工作地点:北京
- 薪资:18-30k
岗位要求:
1、大学本科及以上学历,计算机/自动控制/机械电子等相关专业,1年以上机器人开发经验;
2、熟悉Linux/Unix开发环境,精通C/C++语言,熟悉gcc;
3、了解Qt开发环境,熟练掌握QT库及架构;
4、有ROS开发经验者优先,有Ubuntu平台项目开发经验者优先;
5、有系统的数据通信知识,熟悉TCP/IP协议,精通Socket网络编程者优先。
岗位职责:
1、负责协作机械臂应用的开发与设计;
2、基于公司机械臂产品,对配套设备,如夹爪、视觉等做集成开发。
集成开发工程师
- 学历:本科及以上学历
- 工作地点:常州
- 薪资:15-25k
岗位要求:
1、大学本科及以上学历,计算机/电子信息/信息工程/自动控制/机械工程等相关专业优先;
2、具有三年以上的自动化集成项目经验,有机械臂应用开发经验者优先考虑;
3、该岗位设三个专业方向,满足下述任一条件即可:
1)非标机械设计方向:熟练使用三维制图软件,具备独立完成非标自动化设计的能力;
2)电气方向:熟悉工业现场常用的PLC设备及总线,能绘制电气接线图,具备丰富的电气设备选型经验;
3)软件方向:熟悉Qt或者VS,熟练使用C/C++进行开发,有ROS开发经验者优先考虑。
岗位职责:
1、负责机器人集成项目的需求分析、选型和方案设计,承担集成项目的技术攻关;
2、负责机器人平台的功能调试及现场实施,保证项目在客户现场顺利实施落地;
3、负责为客户提供相应的培训工作;
4、负责机器人集成项目的软件、电气和非标机械设计其中一项专业技术工作。
硬件工程师
- 学历:本科及以上学历
- 工作地点:北京
- 薪资:20-35k
岗位要求:
1. 机电一体化、电子、自动化等专业本科以上学历,具备1年以上工作经验;
2、熟练模拟电路、数字电路的设计;
3、具备4层板及以上的PCB设计经验;
4、熟悉常用的MCU外设;
5、熟练使用C语言。
岗位职责:
1、负责机械臂控制器硬件的设计、开发和调试工作;
2、负责控制器的维护、升级;
3、负责原理图、PCB等设计,并形成相应的文档;
4、MCU底层驱动编写;有linux系统移植经验。
机械工程师
- 学历:大专及以上学历
- 工作地点:北京
- 薪资:18-30k
岗位要求:
1、全日制统招大专及以上学历,机械设计、机械制造、自动化专业优先 ;
2、5 年及以上机器人/非标自动化工作经验 ;
3、能力要求:熟练掌握计算机辅助设计软件;
4、具备机械产品开发经验,了解产品设计和研发流程,进行过独立项目开发;具有较强的计算能力;
5、其他要求:有项目管理经验优先 。
岗位职责:
1、负责机器人机构、结构部分的研发、设计和改进升级工作;
2、负责产品量产工作;
3、负责新产品的研发、设计、调试工作。
电机设计工程师
- 学历:大专及以上学历
- 工作地点:北京/常州
- 薪资:15-25k
岗位要求:
1、全日制统招大专及以上学历,电机、电子、自动化 专业优先;
2、3年及以上电机开发经验,有扎实的理论基础 ;
3、熟练掌握电机设计方法,熟悉常用磁材料性能;有成功产品设计经验等;
4、能够积极主动完成工作,能够和团队很好的融入和配合。
岗位职责:
1、负责机器人电机产品的性能优化;
2、按照产品规划完成电机设计、仿真、开发工作;
3、完成电机性能测试,并实现电机产品量产。
工艺工程师
- 学历:大专及以上学历
- 工作地点:常州
- 薪资:10-25k
岗位要求:
1、全日制统招大专及以上学历,材料、机械、自动化等专业优先;
2、 2年及以上工艺经验,有扎实的理论基础 ;
3、制定与改进作业指导书、工艺卡等工作;
4、熟悉制程不良改善及提升,有机器人行业工作经验的优先。
岗位职责:
1、负责产线对应工序工艺开发,从产品性能、生产效率、成本及安全性等方面优化产品工艺;
2、负责对应SOP标准文件的输出;
3、负责新产品导入与生产工艺落地;
4、配合研发工程师对于新品研发的后续工艺优化与量产。
工艺工程师-工装设计方向
- 学历:大专及以上学历
- 工作地点:常州
- 薪资:10-20k
岗位要求:
1、全日制统招大专及以上学历,材料、机械、自动化等专业优先;
2、3年及以上机械开发经验,有扎实的理论基础 ;
3、熟悉机器人/机械产品的组装流程;
4、熟悉工装设计与机构设计;思路开阔、抗压能力强;
5、有生产现场工装设计开发工作者优先。
岗位职责:
1、负责产品工艺流程所需工装设计、开发与配套;
2、负责工艺环节检验所需工作设计、开发与配套工作;
3、主导现场制程能力改善和提升。
质检员
- 学历:大专及以上学历
- 工作地点:常州
- 薪资:5-6K
岗位要求:
1、能看懂机加图纸,有一年以上品质检验工作或机械加工经验;
2、会使用三坐标编程优先。
岗位职责:
1、负责完成公司来料零件、半成品,产品过程、成品的质量检验工作;
2、针对实际产品,完成质检数据统计,输出质检分析报告,提出质检改进意见;
3、负责整理产品质量文件;
4、负责各类检查仪器、设备、工具的维护及正常使用。
采购专员
- 学历:大专及以上学历
- 工作地点:常州
- 薪资:6-10K
岗位要求:
1、大专及以上学历;
2、2年及以上机加或者电子物料采购经验;
3、善于识别、挑选各类物料商品,具有丰富的采购经验;
4、熟知与本业务有关的财务知识,合同及法律法规知识;
5、具备良好的交际和独立工作的能力,保证货源的供应;
6、具有良好的思想素质,诚实可靠,遵守职业道德;
7、能够适应外出采购的工作压力。
岗位职责:
1、根据采购计划需求及供应商生产能力有效进行订单分配,有效的排程采购回货交期,下达采购订单;根据产品相匹配的供应商,下推采购订单到供应商,进行回货交期协商确认;
2、追踪供应商对采购订单实施进度状态,了解供应商材料、排产、投产进度情况,确保物料交期不延迟,并做好物料追踪表的维护;
3、熟悉透彻的掌握所负责物料的库存,在途等情况,有效调整交货计划,保证工厂有合理的安全库存,确保工厂生产顺利进行;清晰明了所负责产品本周及下周的需求数量,重点跟催缺货物料;
4、对供应商异常及时沟通处理,涉及职权无法处理的事项,必须及时有效逐级提报,并追踪处理结果;针对供应商异常不能按时回货,造成交期延误,根据情况按照采购合同条款规定实施处罚扣款,开具单据经部门经理批准,执行处罚;
5、负责协助不良及呆滞物料的处理;
6、协助财务及供应商月底对账。
采购助理
- 学历:15-25k
- 工作地点:常州
- 薪资:本科及以上学历
岗位要求:
1、大专及以上学历,信息管理专业优先;
2、熟练操作系统、基本办公软件,进行台账整理登记;
3、做事细心、吃苦耐劳、团队协作的精神。
岗位职责:
操作工
- 学历:中专及以上学历
- 工作地点:常州
- 薪资:5-7K
岗位要求:
- 2、 负责机器人动力学建模与仿真、关键参数辨识等相关工作;
- 3、 负责多关节机械臂的轨迹规划和力控算法,包括基于动力学的轨迹优化、重力补偿、碰撞检测和末端力控等;
- 4、 落实机器人算法的软件实现,结合现有平台进行真机测试并解决遇到的问题;
- 5、 协助编写相关文档。
岗位职责:
- 2、 负责机器人动力学建模与仿真、关键参数辨识等相关工作;
- 3、 负责多关节机械臂的轨迹规划和力控算法,包括基于动力学的轨迹优化、重力补偿、碰撞检测和末端力控等;
- 4、 落实机器人算法的软件实现,结合现有平台进行真机测试并解决遇到的问题;
- 5、 协助编写相关文档。
REALMAN JOINS HANDS WITH YOU
TO BUILD A NEW ECO-INDUSTRIAL CHAIN
- *
- *
- *
-
*
Contact Us
-


Alex:+86-18640486517
-


alex@realman-robot.com
-


RealMan Intelligent Technology (Beijing) Co., Ltd.
Add: Room A2-3-1, buliding 24, the 14th block, No.69, Yangzhuang Street, Shijingshan District, Beijing,China
-


RealMan Intelligent Technology (Jiangsu) Co., Ltd.
Add: Plant No.7, Intelligent Digital Industrial Park, Changzhou Science and Education City, Changzhou City, Jiangsu,China
-


RealMan Intelligent Technology (Shenzhen) Co., Ltd.
Add: Room 501, 5th Floor, Building A, Phase I, Huafeng International Robot Industrial Park, Bao'an District, Shenzhen City, Guangdong,China